dalle mie ricerche e semplificazioni tramite gemini sono arrivat* a questo sulle rotazioni di una sfera, le rotazioni di una sfera si possono descrivere come"dati a b c d e (rotazioni qualunque su una sfera 3D) elementi qualunque del gruppo so(3)(che sarebbe la sfera 3D), 1° per ogni a b a•b=c dove c e un elemento specifico di SO(3) variabile per ogni a b 2° per ogni "a•b=c" e per ogni e, se a•b = c allora (a•b)•e=(c)•e 3° per ogni insieme intero o continuo ar=(a1 a2 a3... a(n)), per n < "numero rotazioni totali sfera" rs, esiste un e tale che an •e non appartiene all'insieme a, il tre si puo sostituire con, x(2π)= I, che per le geometrie sferiche si può generalizzare in x(x1•π) = I, non chiedetemi cosa significa quest'immagine perche non ne o idea sembra cinese 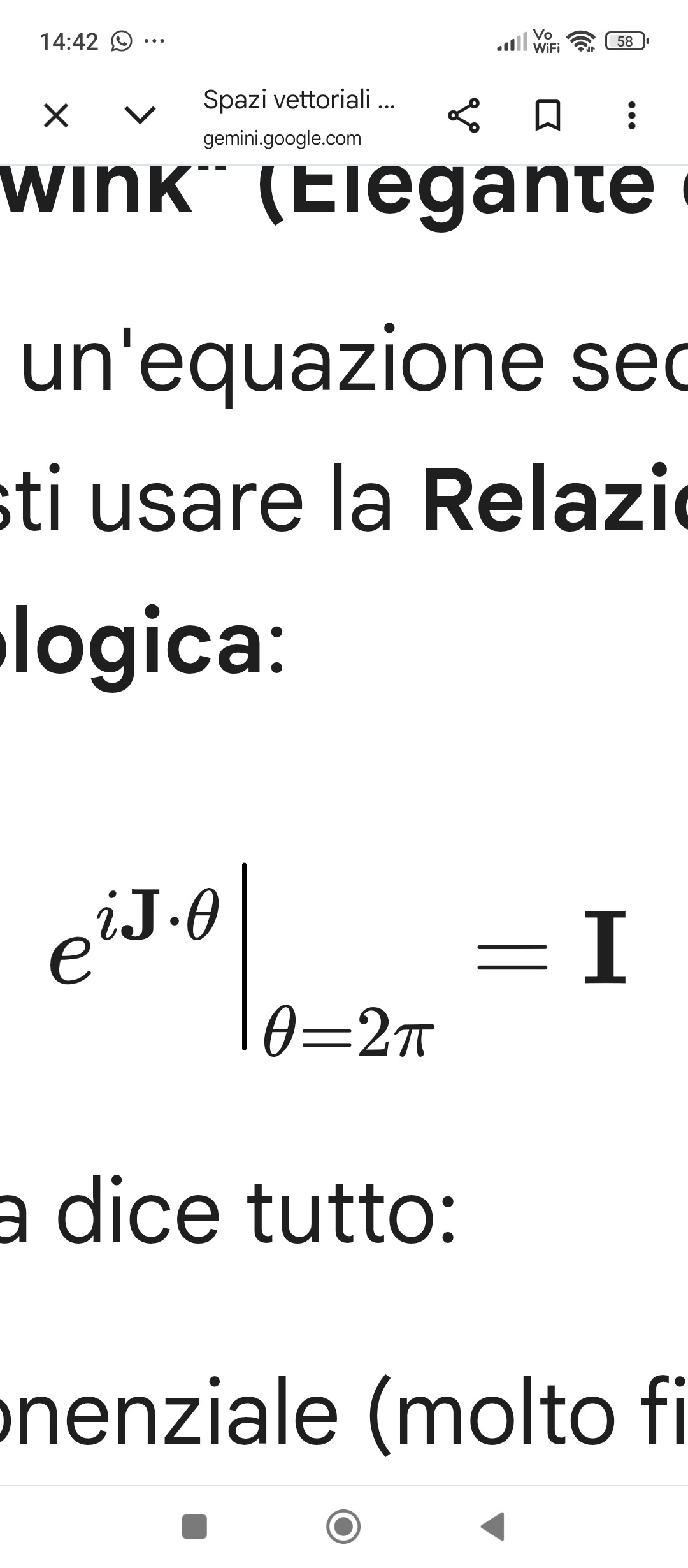
@epimeteo
🚨